Simple protein folding#
\[
U \xrightleftharpoons[k_{-1}]{k_1} I \xrightleftharpoons[k_{-2}]{k_2} F
\]
import stochastix as stx
import jax
import jax.numpy as jnp
import jax.random as rng
import matplotlib.pyplot as plt
import equinox as eqx
key = jax.random.PRNGKey(42)
jax.config.update('jax_enable_x64', True)
jax.config.update('jax_debug_nans', True)
plt.rcParams['font.size'] = 18
from stochastix.kinetics import MassAction
## 1. Define Model Parameters as Log-Rates (units: 1/second)
# These values describe a protein folding on a ~10-second timescale.
# This represents a funnel where U -> I is fast, I -> F is favorable, and F is stable.
# Linear rates: k1=1.0, k_minus1=0.05, k2=0.1, k_minus2=0.001
log_k1 = jnp.log(1.0) # U -> I
log_k_minus1 = float(jnp.log(0.05)) # I -> U
log_k2 = jnp.log(0.1) # I -> F
log_k_minus2 = float(jnp.log(0.001)) # F -> I
## 2. Create the Reaction Network
# The transform=jnp.exp argument tells MassAction to compute the rate as exp(k)
network = stx.ReactionNetwork(
[
# First step: U <--> I
stx.Reaction('U -> I', MassAction(k=log_k1, transform=jnp.exp), name='U_to_I'),
stx.Reaction(
'I -> U', MassAction(k=log_k_minus1, transform=jnp.exp), name='I_to_U'
),
# Second step: I <--> F
stx.Reaction('I -> F', MassAction(k=log_k2, transform=jnp.exp), name='I_to_F'),
stx.Reaction(
'F -> I', MassAction(k=log_k_minus2, transform=jnp.exp), name='F_to_I'
),
],
)
print(f'Species:\t{network.species}')
## 3. Set up Simulation Models
# Total simulation time, e.g., 10 minutes (600 seconds) to ensure folding completes
T = 120.0
# Initial conditions: start with 1 molecule in the Unfolded state
x0 = jnp.array([0, 0, 1]) # Corresponds to [I, F, U]
# Stochastic model using the Gillespie Direct Method
model = stx.systems.StochasticModel(
network, stx.DifferentiableDirect(), T=T, max_steps=1000
)
# Mean-field (ODE) model for comparison
model_mf = stx.systems.MeanFieldModel(network, T=T, saveat_steps=1000)
## 4. Convenience functions to recover linear rates from a model instance
k1_fn = lambda m: jnp.exp(m.network.U_to_I.kinetics.k)
k_minus1_fn = lambda m: jnp.exp(m.network.I_to_U.kinetics.k)
k2_fn = lambda m: jnp.exp(m.network.I_to_F.kinetics.k)
k_minus2_fn = lambda m: jnp.exp(m.network.F_to_I.kinetics.k)
Species: ('F', 'I', 'U')
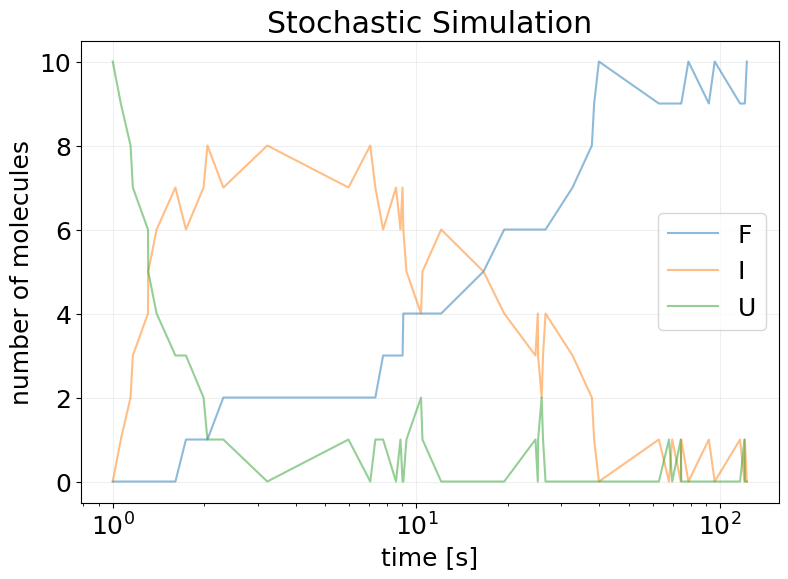
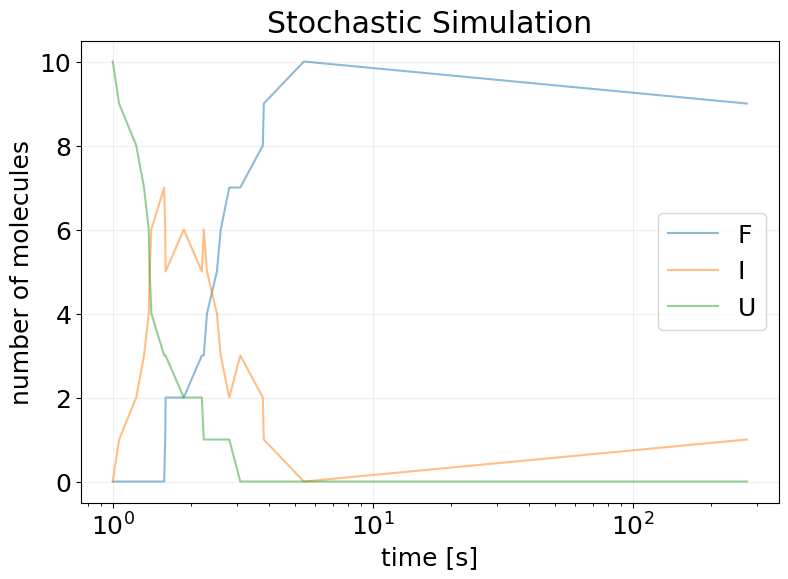
key, subkey = jax.random.split(key)
sim_results = model(subkey, x0 * 10)
stx.plot_abundance_dynamic(
eqx.tree_at(lambda x: x.t, sim_results, sim_results.t + 1), log_x_scale=True
)
plt.title('Stochastic Simulation')
plt.show()
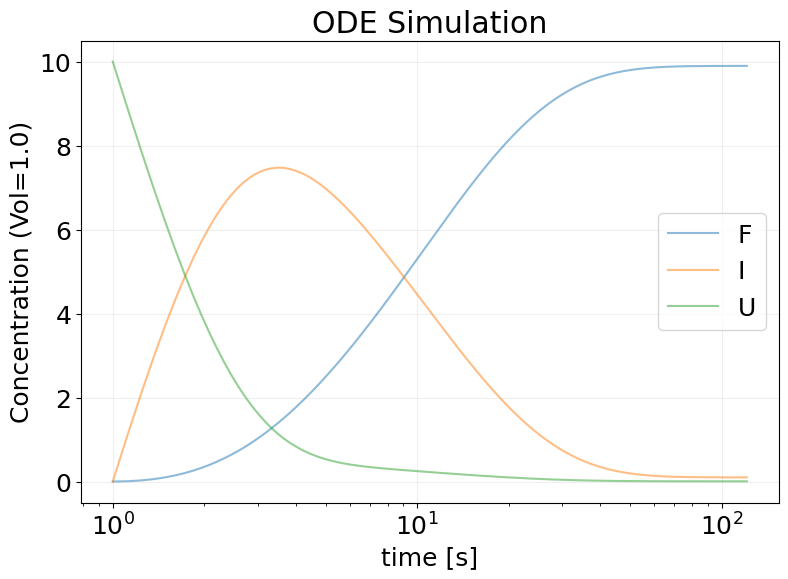
mf_results = model_mf(subkey, x0 * 10)
stx.plot_abundance_dynamic(
eqx.tree_at(lambda x: x.t, mf_results, mf_results.t + 1), log_x_scale=True
)
plt.ylabel(f'Concentration (Vol={network.volume})')
plt.title('ODE Simulation')
plt.show()
/Users/francesco/Documents/GitHub/jax-ssa/jax_ssa/_simulation_results.py:164: UserWarning: This object does not contain reaction information, returning original object.
warnings.warn(
sim_results.x
Array([[ 0., 0., 10.],
[ 0., 1., 9.],
[ 0., 2., 8.],
...,
[10., 0., 0.],
[10., 0., 0.],
[10., 0., 0.]], dtype=float64)
Cost function#
def generate_loss(cost_k1=1.0, cost_k2=1.0, stagnation_penalty_kappa=0.1):
"""
Generates a loss function for the three-state folding model.
Args:
cost_k1: The cost coefficient for the U -> I rate (k1).
cost_k2: The cost coefficient for the I -> F rate (k2).
stagnation_penalty_kappa: The penalty coefficient for time spent in state I.
Returns:
A function that computes the total loss for a given simulation.
"""
def _loss(model, x0, key):
# Run a single stochastic simulation from the model's initial state
sim_results = model(key, x0)
## 1. Calculate the Stagnation Cost
# This is proportional to the SQUARE of the total time spent in state I.
# Get the population of the intermediate state 'I' during each interval
I_idx = model.network.species.index('I')
pop_I = sim_results.x[:-1, I_idx]
# Get the population of the unfolded state U during each interval
U_idx = model.network.species.index('U')
pop_U = sim_results.x[:-1, U_idx]
# Get the duration of each time step (interval)
dt = jnp.diff(sim_results.t)
# Calculate the total integrated time in state I, T_I = integral(pop_I(t) dt)
total_time_in_I = jnp.sum(pop_I * dt)
# Calculate the total integrated time in state U, T_U = integral(pop_U(t) dt)
total_time_in_U = jnp.sum(pop_U * dt)
# The stagnation cost is (kappa/T) * (T_I)^2
stagnation_cost = stagnation_penalty_kappa * (total_time_in_I**2) / model.T
stagnation_cost += stagnation_penalty_kappa * (total_time_in_U**2) / model.T # noqa
## 2. Calculate the Operational Cost
# This is the linear cost of the "design knob" rates, k1 and k2.
# Recover the linear rate k1 from the model's log-parameterization
k1 = model.network.U_to_I.kinetics.k
k1 = model.network.U_to_I.kinetics.transform(k1)
# Recover the linear rate k2 from the model's log-parameterization
k2 = model.network.I_to_F.kinetics.k
k2 = model.network.I_to_F.kinetics.transform(k2)
operational_cost = cost_k1 * k1 + cost_k2 * k2
## 3. Return the Total Loss
return operational_cost + stagnation_cost
return _loss
Training Function#
import equinox as eqx
import optax
from tqdm import tqdm
def train( # noqa
key,
model,
x0,
LOSS_FN,
EPOCHS=20,
BATCH_SIZE=32,
LEARNING_RATE=1e-3,
):
# trick to vmap over named arguments
loss_and_grads = eqx.filter_value_and_grad(LOSS_FN)
loss_and_grads = eqx.filter_vmap(loss_and_grads, in_axes=(None, None, 0))
losses = []
opt = optax.adam(LEARNING_RATE)
opt_state = opt.init(eqx.filter(model, eqx.is_array))
@eqx.filter_jit
def make_step(model, opt_state, key):
key, *subkeys = rng.split(key, BATCH_SIZE + 1)
subkeys = jnp.array(subkeys)
loss, grads = loss_and_grads(model, x0, subkeys)
grads = jax.tree.map(lambda x: x.mean(axis=0), grads)
updates, opt_state = opt.update(grads, opt_state, model)
model = eqx.apply_updates(model, updates)
return model, opt_state, loss.mean()
epoch_subkeys = rng.split(key, EPOCHS)
pbar = tqdm(epoch_subkeys)
for epoch_key in pbar:
try:
model, opt_state, loss = make_step(model, opt_state, epoch_key)
losses += [float(loss)]
pbar.set_description(f'Loss: {loss:.2f}')
except KeyboardInterrupt:
print('Training Interrupted')
break
log = {'loss': losses}
return model, log
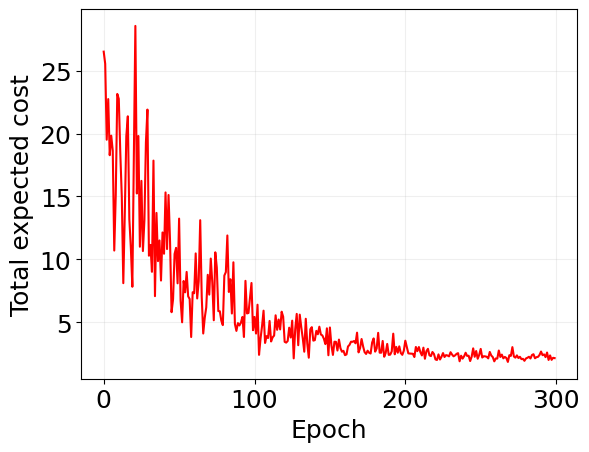
Optimize for fixed costs#
Stochastic#
cost_k1 = 1.0
cost_k2 = 1.0
stagnation_penalty_kappa = 10.0
loss_fn = generate_loss(
cost_k1=cost_k1,
cost_k2=cost_k2,
stagnation_penalty_kappa=stagnation_penalty_kappa,
)
key, train_key = rng.split(key)
reparam_trained_model, log = train(
train_key,
model,
x0,
LOSS_FN=loss_fn,
EPOCHS=300,
BATCH_SIZE=32,
LEARNING_RATE=1e-2,
)
Loss: 2.14: 100%|██████████| 300/300 [00:15<00:00, 19.85it/s]
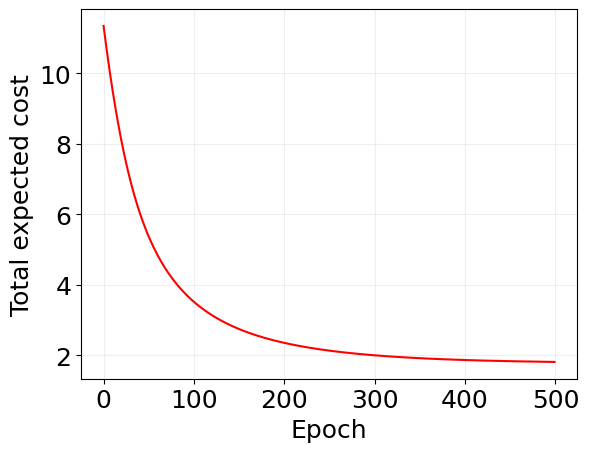
plt.plot(log['loss'], 'r')
plt.xlabel('Epoch')
plt.ylabel('Total expected cost')
plt.grid(alpha=0.2)
k1 = k1_fn(model)
k2 = k2_fn(model)
print(f'Initial k1: {k1:.2f}')
print(f'Initial k2: {k2:.2f}')
print('--------------------------------')
k1_opt = k1_fn(reparam_trained_model)
k2_opt = k2_fn(reparam_trained_model)
print(f'Final k1: {k1_opt:.2f}')
print(f'Final k2: {k2_opt:.2f}')
Initial k1: 1.00
Initial k2: 0.10
--------------------------------
Final k1: 0.73
Final k2: 0.75
key, subkey = jax.random.split(key)
sim_results = reparam_trained_model(subkey, x0 * 10)
stx.plot_abundance_dynamic(
eqx.tree_at(lambda x: x.t, sim_results, sim_results.t + 1), log_x_scale=True
)
plt.title('Stochastic Simulation')
plt.show()
# mf_results = model_mf(subkey, x0*10)
# stx.plot_abundance_dynamic(
# eqx.tree_at(lambda x: x.t, mf_results, mf_results.t + 1), log_x_scale=True
# )
# plt.ylabel(f'Concentration (Vol={network.volume})')
# plt.title('ODE Simulation')
# plt.show()
Mean Field#
key, train_key = rng.split(key)
mf_trained_model, log_mf = train(
train_key,
model_mf,
x0,
LOSS_FN=loss_fn,
EPOCHS=500,
BATCH_SIZE=1,
LEARNING_RATE=1e-2,
)
Loss: 1.82: 100%|██████████| 500/500 [00:08<00:00, 60.26it/s]
k1 = k1_fn(model)
k2 = k2_fn(model)
print(f'Initial k1: {k1:.2f}')
print(f'Initial k2: {k2:.2f}')
print('--------------------------------')
k1_opt = k1_fn(mf_trained_model)
k2_opt = k2_fn(mf_trained_model)
print(f'Final k1: {k1_opt:.2f}')
print(f'Final k2: {k2_opt:.2f}')
Initial k1: 1.00
Initial k2: 0.10
--------------------------------
Final k1: 0.60
Final k2: 0.50
plt.plot(log_mf['loss'], 'r')
plt.xlabel('Epoch')
plt.ylabel('Total expected cost')
plt.grid(alpha=0.2)
key, *cost_subkeys = jax.random.split(key, 3001)
cost_subkeys = jnp.array(cost_subkeys)
### Init
init_costs = eqx.filter_vmap(loss_fn, in_axes=(None, None, 0))(model, x0, cost_subkeys)
### Opt Stoch
opt_costs = eqx.filter_vmap(loss_fn, in_axes=(None, None, 0))(
reparam_trained_model, x0, cost_subkeys
)
### Opt ODE
mf_to_stoch_model = stx.StochasticModel(
mf_trained_model.network,
stx.DirectMethod(),
mf_trained_model.T,
mf_trained_model.max_steps,
)
mf_opt_costs = eqx.filter_vmap(loss_fn, in_axes=(None, None, 0))(
mf_to_stoch_model, x0, cost_subkeys
)
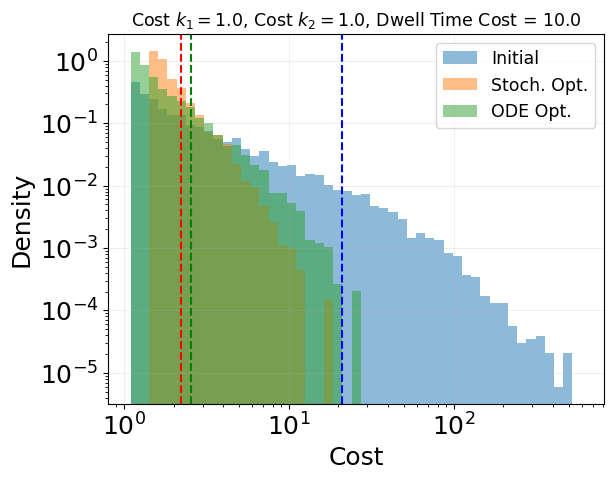
init_costs.mean(), opt_costs.mean(), mf_opt_costs.mean()
(Array(20.95455734, dtype=float64),
Array(2.21525593, dtype=float64),
Array(2.54805691, dtype=float64))
# Create logarithmic bins for better visualization of log-scale data
min_cost = min(jnp.min(init_costs), jnp.min(opt_costs), jnp.min(mf_opt_costs))
max_cost = max(jnp.max(init_costs), jnp.max(opt_costs), jnp.max(mf_opt_costs))
log_bins = jnp.logspace(jnp.log10(min_cost), jnp.log10(max_cost), 50)
plt.hist(init_costs, bins=log_bins, alpha=0.5, label='Initial', density=True)
plt.hist(opt_costs, bins=log_bins, alpha=0.5, label='Stoch. Opt.', density=True)
plt.hist(mf_opt_costs, bins=log_bins, alpha=0.5, label='ODE Opt.', density=True)
plt.grid(alpha=0.2)
plt.legend(fontsize='x-small')
plt.xlabel('Cost')
plt.ylabel('Density')
plt.title(
f'Cost $k_1 = {cost_k1}$, Cost $k_2 = {cost_k2}$, Dwell Time Cost = {stagnation_penalty_kappa}',
fontsize='x-small',
)
plt.axvline(jnp.mean(init_costs), color='blue', linestyle='--', label='Initial')
plt.axvline(jnp.mean(opt_costs), color='red', linestyle='--', label='Stoch. Opt.')
plt.axvline(jnp.mean(mf_opt_costs), color='green', linestyle='--', label='ODE Opt.')
plt.xscale('log')
plt.yscale('log')
plt.show()
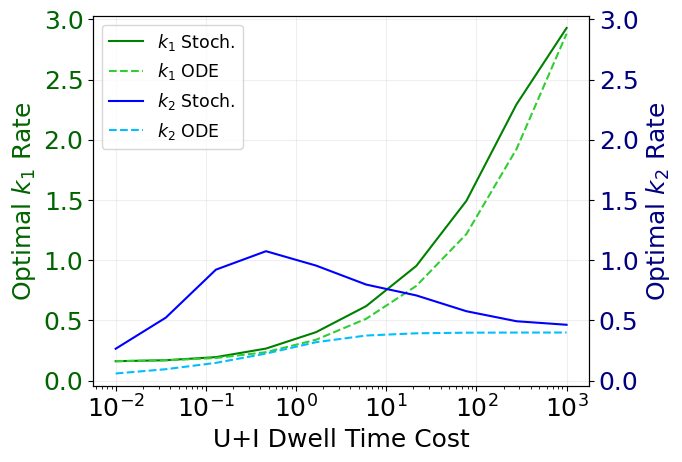
Scaling with Dwell Time Cost#
dwell_costs = jnp.logspace(-2, 3, 10)
key, train_key = rng.split(key)
### STOCHASTIC SIMULATION
scaling_log = {
'loss': jnp.zeros_like(dwell_costs),
'k1': jnp.zeros_like(dwell_costs),
'k2': jnp.zeros_like(dwell_costs),
'dwell_cost': dwell_costs,
}
loss_per_cost = []
for i, dwell_cost in enumerate(dwell_costs):
loss_fn = generate_loss(
cost_k1=1.0, cost_k2=1.0, stagnation_penalty_kappa=dwell_cost
)
trained_model, log = train(
train_key,
model,
x0,
LOSS_FN=loss_fn,
EPOCHS=300,
BATCH_SIZE=48,
LEARNING_RATE=1e-2,
)
loss_per_cost.append(log['loss'])
scaling_log['loss'] = scaling_log['loss'].at[i].set(log['loss'][-1])
scaling_log['k1'] = scaling_log['k1'].at[i].set(k1_fn(trained_model))
scaling_log['k2'] = scaling_log['k2'].at[i].set(k2_fn(trained_model))
Loss: 0.44: 100%|██████████| 300/300 [00:20<00:00, 14.95it/s]
Loss: 0.72: 100%|██████████| 300/300 [00:20<00:00, 14.49it/s]
Loss: 1.17: 100%|██████████| 300/300 [00:19<00:00, 15.10it/s]
Loss: 1.45: 100%|██████████| 300/300 [00:20<00:00, 14.33it/s]
Loss: 1.56: 100%|██████████| 300/300 [00:19<00:00, 15.07it/s]
Loss: 1.95: 100%|██████████| 300/300 [00:19<00:00, 15.41it/s]
Loss: 3.10: 100%|██████████| 300/300 [00:20<00:00, 14.46it/s]
Loss: 7.81: 100%|██████████| 300/300 [00:18<00:00, 16.07it/s]
Loss: 31.23: 100%|██████████| 300/300 [00:18<00:00, 16.17it/s]
Loss: 115.32: 100%|██████████| 300/300 [00:18<00:00, 16.36it/s]
### ODE SIMULATION
mf_scaling_log = {
'loss': jnp.zeros_like(dwell_costs),
'k1': jnp.zeros_like(dwell_costs),
'k2': jnp.zeros_like(dwell_costs),
'dwell_cost': dwell_costs,
}
mf_loss_per_cost = []
for i, dwell_cost in enumerate(dwell_costs):
loss_fn = generate_loss(
cost_k1=1.0, cost_k2=1.0, stagnation_penalty_kappa=dwell_cost
)
trained_model, log = train(
train_key,
model_mf,
x0,
LOSS_FN=loss_fn,
EPOCHS=300,
BATCH_SIZE=1,
LEARNING_RATE=1e-2,
)
mf_loss_per_cost.append(log['loss'])
mf_scaling_log['loss'] = mf_scaling_log['loss'].at[i].set(log['loss'][-1])
mf_scaling_log['k1'] = mf_scaling_log['k1'].at[i].set(k1_fn(trained_model))
mf_scaling_log['k2'] = mf_scaling_log['k2'].at[i].set(k2_fn(trained_model))
Loss: 0.26: 100%|██████████| 300/300 [00:02<00:00, 111.10it/s]
Loss: 0.33: 100%|██████████| 300/300 [00:02<00:00, 112.88it/s]
Loss: 0.45: 100%|██████████| 300/300 [00:02<00:00, 109.98it/s]
Loss: 0.66: 100%|██████████| 300/300 [00:02<00:00, 111.71it/s]
Loss: 1.00: 100%|██████████| 300/300 [00:02<00:00, 111.44it/s]
Loss: 1.59: 100%|██████████| 300/300 [00:02<00:00, 110.02it/s]
Loss: 3.03: 100%|██████████| 300/300 [00:02<00:00, 103.67it/s]
Loss: 7.32: 100%|██████████| 300/300 [00:02<00:00, 101.79it/s]
Loss: 21.43: 100%|██████████| 300/300 [00:02<00:00, 101.09it/s]
Loss: 70.01: 100%|██████████| 300/300 [00:03<00:00, 99.13it/s]
fig, ax1 = plt.subplots()
# Get data ranges to set shared y-axis limits
all_k1_values = jnp.concatenate([scaling_log['k1'], mf_scaling_log['k1']])
all_k2_values = jnp.concatenate([scaling_log['k2'], mf_scaling_log['k2']])
y_min = min(jnp.min(all_k1_values), jnp.min(all_k2_values)) - 0.1
y_max = max(jnp.max(all_k1_values), jnp.max(all_k2_values)) + 0.1
# Plot k1 on left y-axis
ax1.plot(scaling_log['dwell_cost'], scaling_log['k1'], 'g', label='$k_1$ Stoch.')
ax1.plot(
mf_scaling_log['dwell_cost'],
mf_scaling_log['k1'],
'limegreen',
linestyle='--',
label='$k_1$ ODE',
)
ax1.set_xscale('log')
ax1.set_xlabel('U+I Dwell Time Cost')
ax1.set_ylabel('Optimal $k_1$ Rate', color='darkgreen')
ax1.tick_params(axis='y', labelcolor='darkgreen')
ax1.set_ylim(y_min, y_max)
ax1.grid(alpha=0.2)
# Create second y-axis for k2 with shared limits
ax2 = ax1.twinx()
ax2.plot(scaling_log['dwell_cost'], scaling_log['k2'], 'b', label='$k_2$ Stoch.')
ax2.plot(
mf_scaling_log['dwell_cost'],
mf_scaling_log['k2'],
'deepskyblue',
linestyle='--',
label='$k_2$ ODE',
)
ax2.set_ylabel('Optimal $k_2$ Rate', color='navy')
ax2.tick_params(axis='y', labelcolor='navy')
ax2.set_ylim(y_min, y_max)
# Add common legend
lines1, labels1 = ax1.get_legend_handles_labels()
lines2, labels2 = ax2.get_legend_handles_labels()
ax1.legend(lines1 + lines2, labels1 + labels2, loc='upper left', fontsize='x-small')
<matplotlib.legend.Legend at 0x138c8ce90>