import equinox as eqx
import jax
import jax.numpy as jnp
import jax.random as rng
import matplotlib.pyplot as plt
# training deps
import optax
from tqdm import tqdm
import stochastix as stx
jax.config.update('jax_enable_x64', True)
key = rng.PRNGKey(42)
plt.rcParams['font.size'] = 18
/Users/francesco/Documents/GitHub/stochastix/stochastix/utils/__init__.py:3: FutureWarning: The 'stochastix.utils.optimization' module is experimental and it may change or be removed without notice in future versions.
from . import nn, optimization, visualization
Positive Self-Loop Gene Expression#
The model consists of four key reactions:
- Transcription: DNA → mRNA (Hill activator kinetics, \(k_{v0} + k_v \frac{K^n}{K^n + P^n}\))
- Translation: mRNA → mRNA + Protein (rate constant \(k_p\))
- mRNA degradation: mRNA → ∅ (rate constant \(γ_m\))
- Protein degradation: Protein → ∅ (rate constant \(γ_p\))
This simple model captures the essential dynamics of positively self-regulating gene expression and is one of the classic network motifs. The model can be simulated using stochastic simulation algorithms (SSA) or solved deterministically as an ODE system. In the stochasic regime, the model can exibith a bimodal distribution of protein levels, a characteristic that is invisible in the deterministic ODE formulation. We'll demonstrate both parameter optimization using stochastic gradients and ODE-based training to fit the model to a target protein steady-state level.
# Define initial parameters
log_k_v = jnp.log(0.09)
log_k_n = jnp.log(3.5)
log_k_K = jnp.log(50.0)
log_k_v0 = jnp.log(1e-2)
log_k_p = jnp.log(0.025)
log_gamma_m = jnp.log(0.01)
log_gamma_p = jnp.log(0.002)
from stochastix import Reaction, ReactionNetwork
from stochastix.kinetics import HillActivator, MassAction
network = ReactionNetwork(
[
Reaction(
'0 -> mRNA',
HillActivator(
regulator='P',
v=log_k_v,
K=log_k_K,
n=log_k_n,
v0=log_k_v0,
transform_v=jnp.exp,
transform_K=jnp.exp,
transform_n=jnp.exp,
transform_v0=jnp.exp,
),
name='Transcription',
),
Reaction(
'mRNA -> mRNA + P',
MassAction(log_k_p, transform=jnp.exp),
name='Translation',
),
Reaction(
'mRNA -> 0',
MassAction(log_gamma_m, transform=jnp.exp),
name='mRNA_deg',
),
Reaction(
'P -> 0',
MassAction(log_gamma_p, transform=jnp.exp),
name='Protein_deg',
),
]
)
/Users/francesco/Documents/GitHub/stochastix/stochastix/kinetics/_hill.py:84: UserWarning: `v` is negative. Please ensure the provided `transform_v` maps it to a positive value.
warnings.warn(
/Users/francesco/Documents/GitHub/stochastix/stochastix/kinetics/_hill.py:91: UserWarning: `v0` is negative. Please ensure the provided `transform_v0` maps it to a positive value.
warnings.warn(
x0 = jnp.array([0.0, 0.0])
max_steps = int(1.5e4)
T = 3600.0 * 3
# couple reaction network to stochastic solver in a convenient way
model = stx.StochasticModel(
network, stx.DifferentiableDirect(), T=T, max_steps=max_steps
)
mf_model = stx.MeanFieldModel(network, T=T)
print(network)
R0 (Transcription): 0 -> mRNA | HillActivator
R1 (Translation): mRNA -> P + mRNA | MassAction
R2 (mRNA_deg): mRNA -> 0 | MassAction
R3 (Protein_deg): P -> 0 | MassAction
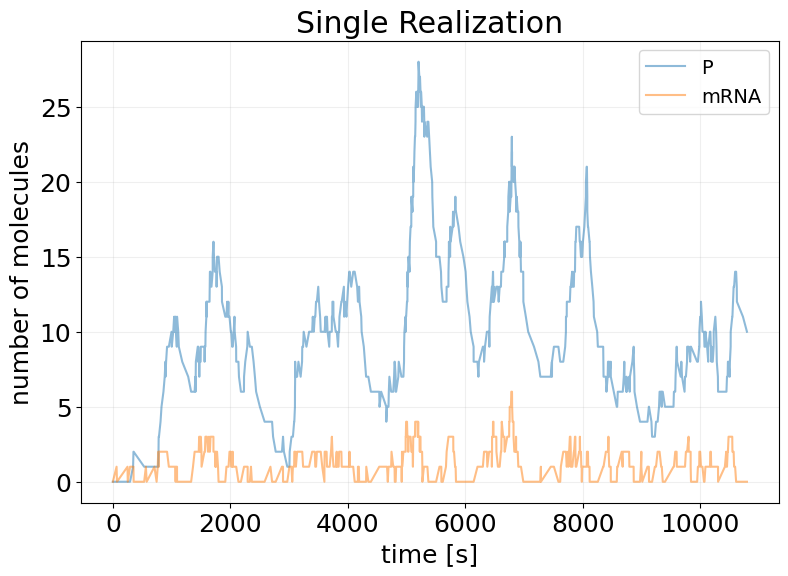
Stochastic Simulations#
## Single Realization
key, subkey = rng.split(key)
sim_results = model(subkey, x0)
fig, ax = stx.plot_abundance_dynamic(sim_results)
ax.set_title('Single Realization')
ax.legend(fontsize=14);
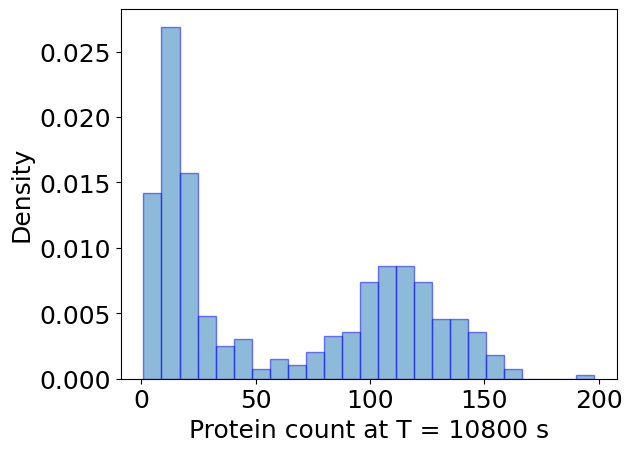
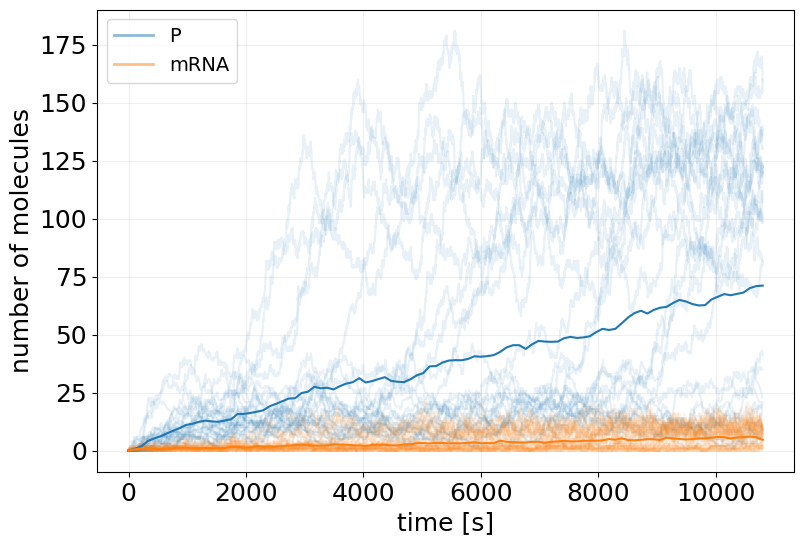
## Ensemble Simulation
key, *subkeys = rng.split(key, 501)
subkeys = jnp.array(subkeys)
x0 = jnp.array([0.0, 0.0])
sim_init_ensemble_fn = eqx.filter_vmap(model, in_axes=(0, None))
sim_init_ensemble = sim_init_ensemble_fn(subkeys, x0)
plt.hist(
sim_init_ensemble.x[:, -1, 0],
bins=25,
alpha=0.5,
label='Init.',
density=True,
edgecolor='b',
)
plt.xlabel(f'Protein count at T = {T:.0f} s')
plt.ylabel('Density')
plt.show()
sim_init_ensemble = sim_init_ensemble_fn(subkeys[:30], x0)
fig, ax = stx.plot_abundance_dynamic(sim_init_ensemble, line_alpha=0.1)
t_interp = jnp.linspace(0, model.T, 100)
x_interp = sim_init_ensemble.interpolate(t_interp).x
ax.plot(t_interp, x_interp.mean(axis=0))
ax.legend(fontsize=14)
plt.show()
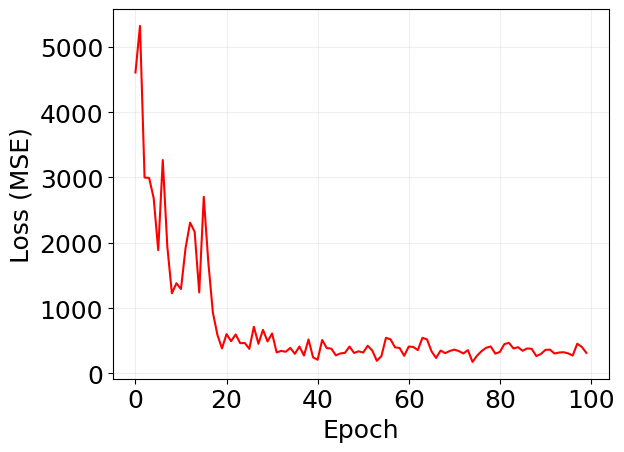
Reparameterized Training#
def loss_fn(model, x, y, key):
sim_results = model(key, x)
prot_idx = sim_results.species.index('P')
return jnp.power(sim_results.x[-1, prot_idx] - y, 2)
def train_fstate(
key,
model,
x0,
y,
LOSS_FN,
EPOCHS=20,
BATCH_SIZE=32,
LEARNING_RATE=1e-3,
):
# trick to vmap over named arguments
loss_and_grads = eqx.filter_value_and_grad(LOSS_FN)
loss_and_grads = eqx.filter_vmap(loss_and_grads, in_axes=(None, None, None, 0))
losses = []
opt = optax.adam(LEARNING_RATE)
opt_state = opt.init(eqx.filter(model, eqx.is_array))
@eqx.filter_jit
def make_step(model, opt_state, key):
key, *subkeys = rng.split(key, BATCH_SIZE + 1)
subkeys = jnp.array(subkeys)
loss, grads = loss_and_grads(model, x0, y, subkeys)
grads = jax.tree.map(lambda x: x.mean(axis=0), grads)
updates, opt_state = opt.update(grads, opt_state, model)
model = eqx.apply_updates(model, updates)
return model, opt_state, loss.mean()
epoch_subkeys = rng.split(key, EPOCHS)
pbar = tqdm(epoch_subkeys)
for epoch_key in pbar:
try:
model, opt_state, loss = make_step(model, opt_state, epoch_key)
losses += [float(loss)]
pbar.set_description(f'Loss: {loss:.2f}')
except KeyboardInterrupt:
print('Training Interrupted')
break
log = {'loss': losses}
return model, log
TARGET_PSS = 100.0
key, train_key = rng.split(key)
reparam_trained_model, log = train_fstate(
train_key,
model,
x0,
y=TARGET_PSS,
LOSS_FN=loss_fn,
EPOCHS=100,
BATCH_SIZE=32,
LEARNING_RATE=1e-2,
)
Loss: 315.84: 100%|██████████| 100/100 [00:44<00:00, 2.26it/s]
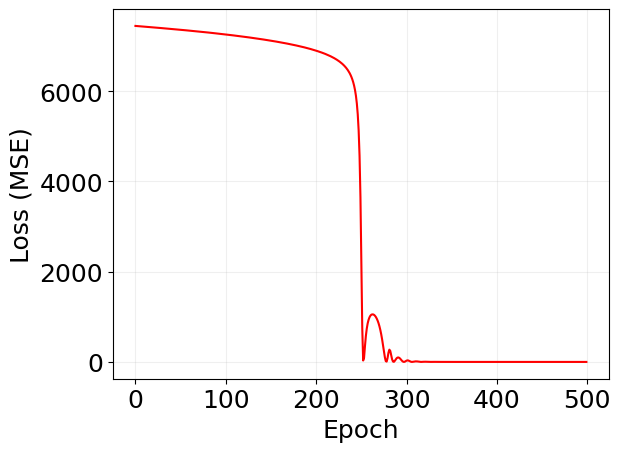
plt.plot(log['loss'], 'r')
plt.xlabel('Epoch')
plt.ylabel('Loss (MSE)')
plt.grid(alpha=0.2)
## Ensemble Simulation
key, *subkeys = rng.split(key, 31)
subkeys = jnp.array(subkeys)
x0 = jnp.array([0.0, 0.0])
sim_reparam_ensemble_fn = eqx.filter_vmap(reparam_trained_model, in_axes=(0, None))
sim_reparam_ensemble = sim_reparam_ensemble_fn(subkeys, x0)
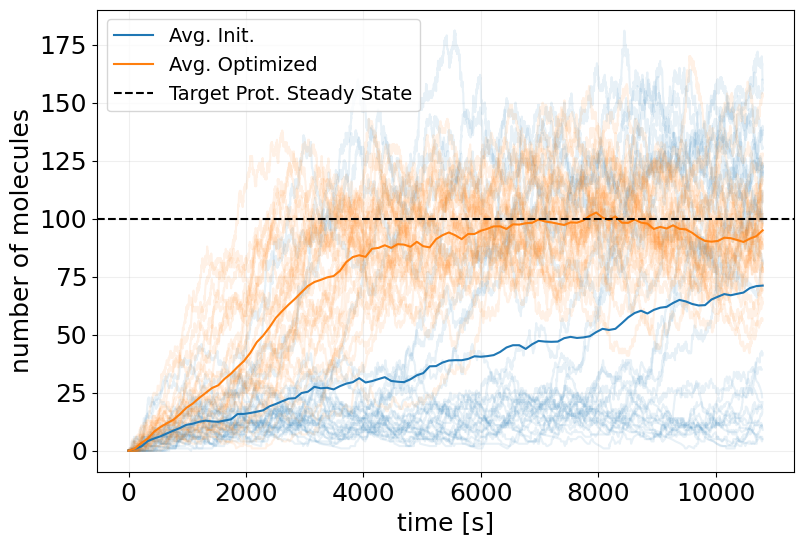
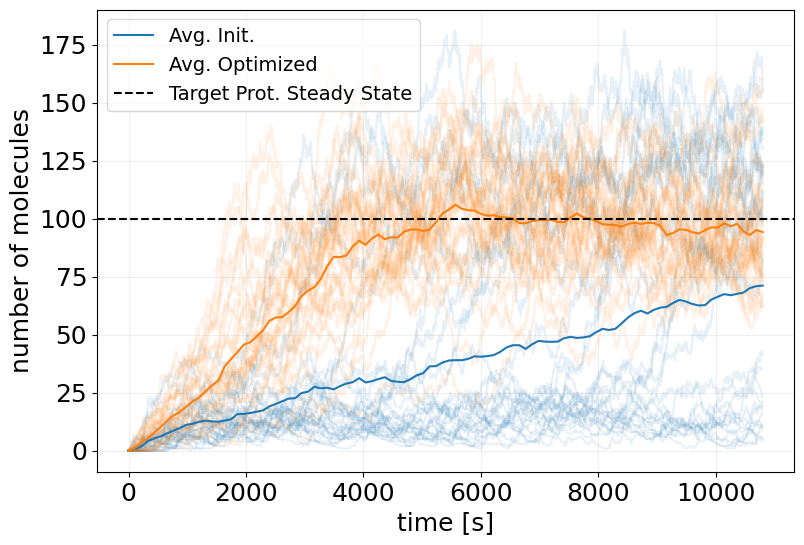
# plot initial ensemble
fig, ax = stx.plot_abundance_dynamic(
sim_init_ensemble, 'P', line_alpha=0.1, legend=False
)
# plot trained ensemble
_, ax = stx.plot_abundance_dynamic(
sim_reparam_ensemble, 'P', line_alpha=0.1, ax=ax, legend=False
)
# plot mean trajectories
t_interp = jnp.linspace(0, model.T, 100)
x_interp = sim_init_ensemble.interpolate(t_interp).x
x_interp_trained = sim_reparam_ensemble.interpolate(t_interp).x
ax.plot(t_interp, x_interp.mean(axis=0)[:, 0], label='Avg. Init.')
ax.plot(t_interp, x_interp_trained.mean(axis=0)[:, 0], label='Avg. Optimized')
ax.axhline(TARGET_PSS, color='k', linestyle='--', label='Target Prot. Steady State')
ax.legend(fontsize=14)
plt.show()
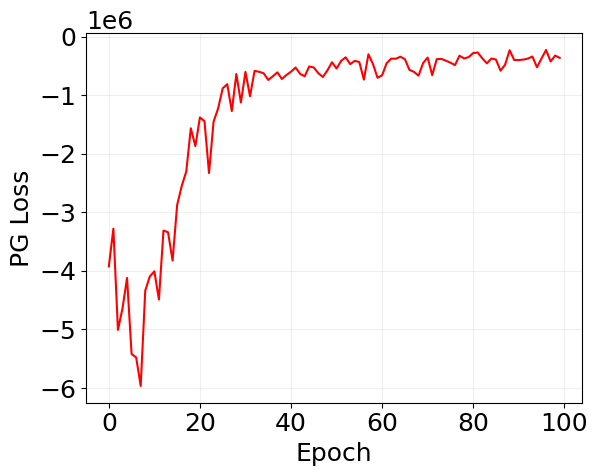
REINFORCE Training#
from stochastix.utils.optimization import (
discounted_returns,
neg_final_state_distance,
reinforce_loss,
)
# training
def train_fstate_reinforce(
key,
model,
x0,
y,
REWARDS_FN,
LOSS_FN,
EPOCHS=20,
LEARNING_RATE=1e-3,
BATCH_SIZE=32,
REW_DISCOUNT=1.0,
rew_avg_baseline=True,
):
# trick to vmap over named arguments
rewards_fn = lambda x, y: REWARDS_FN(x, target_ss=y)
loss_and_grads = eqx.filter_vmap(
eqx.filter_value_and_grad(LOSS_FN),
in_axes=(None, eqx.if_array(0), 0), # network, sim_results, rewards
)
losses = []
rewards = []
opt = optax.adam(LEARNING_RATE)
opt_state = opt.init(eqx.filter(model, eqx.is_array))
@eqx.filter_jit
def make_step(model, opt_state, key):
key, *subkeys = rng.split(key, BATCH_SIZE + 1)
subkeys = jnp.array(subkeys)
# TODO: check time overflow with checkify
sim_results = eqx.filter_vmap(model, in_axes=(0, None))(subkeys, x0)
rewards = eqx.filter_vmap(rewards_fn, in_axes=(eqx.if_array(0), None))(
sim_results, y
)
returns = eqx.filter_vmap(discounted_returns, in_axes=(0, None))(
rewards, REW_DISCOUNT
)
if rew_avg_baseline:
returns = returns - returns.mean(axis=0)
loss, grads = loss_and_grads(model, sim_results, returns)
grads = jax.tree.map(lambda x: x.mean(axis=0), grads)
updates, opt_state = opt.update(grads, opt_state, model)
model = eqx.apply_updates(model, updates)
rewards = jnp.mean(rewards.sum(axis=1))
return model, opt_state, loss.mean(), rewards
epoch_subkeys = rng.split(key, EPOCHS)
pbar = tqdm(epoch_subkeys)
for epoch_key in pbar:
try:
model, opt_state, loss, reward = make_step(model, opt_state, epoch_key)
losses += [float(loss)]
rewards += [float(reward)]
pbar.set_description(f'Loss: {loss:.2f}, Reward: {reward:.2f}')
except KeyboardInterrupt:
print('Training Interrupted')
break
log = {'loss': losses, 'reward': rewards}
return model, log
# train model
rewards_fn = neg_final_state_distance(species='P', distance='L2')
# create loss function
rloss_fn = reinforce_loss()
TARGET_PSS = 100.0
key, train_key = rng.split(key)
pg_trained_model, log_pg = train_fstate_reinforce(
train_key,
model,
x0,
TARGET_PSS,
rewards_fn,
rloss_fn,
EPOCHS=100,
LEARNING_RATE=1e-2,
BATCH_SIZE=64,
REW_DISCOUNT=1.0,
rew_avg_baseline=True,
)
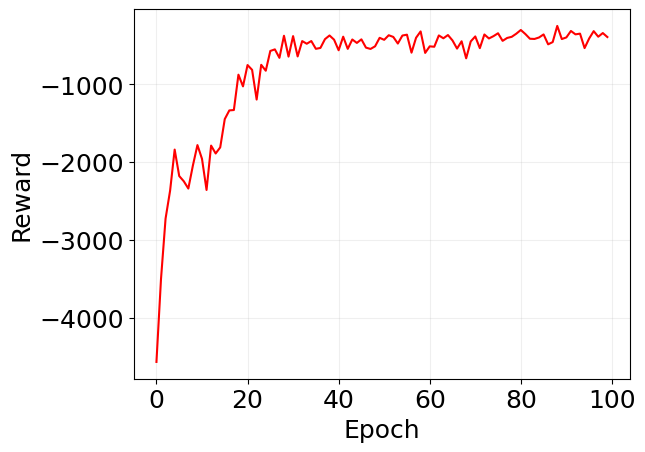
Loss: -360595.22, Reward: -391.58: 100%|██████████| 100/100 [01:18<00:00, 1.27it/s]
plt.plot(log_pg['loss'], 'r')
plt.xlabel('Epoch')
plt.ylabel('PG Loss')
plt.grid(alpha=0.2)
plt.show()
plt.plot(jnp.array(log_pg['reward']), 'r')
plt.xlabel('Epoch')
plt.ylabel('Reward')
plt.grid(alpha=0.2)
plt.show()
## Ensemble Simulation
key, *subkeys = rng.split(key, 31)
subkeys = jnp.array(subkeys)
x0 = jnp.array([0.0, 0.0])
sim_pg_ensemble_fn = eqx.filter_vmap(pg_trained_model, in_axes=(0, None))
sim_pg_ensemble = sim_pg_ensemble_fn(subkeys, x0)
# plot initial ensemble
fig, ax = stx.plot_abundance_dynamic(
sim_init_ensemble, 'P', line_alpha=0.1, legend=False
)
# plot trained ensemble
_, ax = stx.plot_abundance_dynamic(
sim_pg_ensemble, 'P', line_alpha=0.1, ax=ax, legend=False
)
# plot mean trajectories
t_interp = jnp.linspace(0, model.T, 100)
x_interp = sim_init_ensemble.interpolate(t_interp).x
x_interp_trained = sim_pg_ensemble.interpolate(t_interp).x
ax.plot(t_interp, x_interp.mean(axis=0)[:, 0], label='Avg. Init.')
ax.plot(t_interp, x_interp_trained.mean(axis=0)[:, 0], label='Avg. Optimized')
ax.axhline(TARGET_PSS, color='k', linestyle='--', label='Target Prot. Steady State')
ax.legend(fontsize=14)
plt.show()
Mean Field Training#
TARGET_PSS = 100.0
key, train_key = rng.split(key)
mf_trained_model, log_mf = train_fstate(
train_key,
mf_model,
x0,
y=TARGET_PSS,
LOSS_FN=loss_fn,
EPOCHS=500,
BATCH_SIZE=1,
LEARNING_RATE=1e-4,
)
Loss: 0.00: 100%|██████████| 500/500 [00:04<00:00, 120.37it/s]
plt.plot(log_mf['loss'], 'r')
plt.xlabel('Epoch')
plt.ylabel('Loss (MSE)')
# plt.yscale('log')
plt.grid(alpha=0.2)
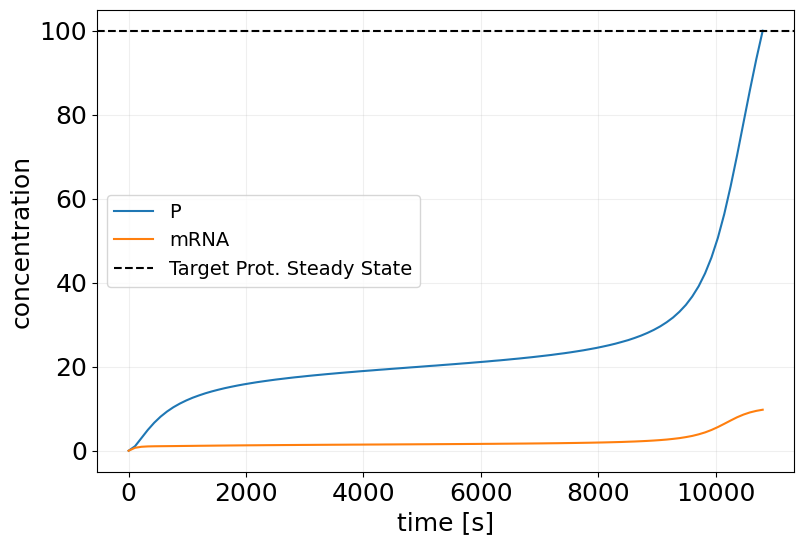
sim_mf_trained = mf_trained_model(key, x0, saveat_steps=100)
plt.figure(figsize=(9, 6))
plt.plot(sim_mf_trained.t, sim_mf_trained.x, label=sim_mf_trained.species)
plt.xlabel('time [s]')
plt.ylabel('concentration')
plt.axhline(TARGET_PSS, color='k', linestyle='--', label='Target Prot. Steady State')
plt.grid(alpha=0.2)
plt.legend(fontsize=14)
<matplotlib.legend.Legend at 0x38fd952a0>
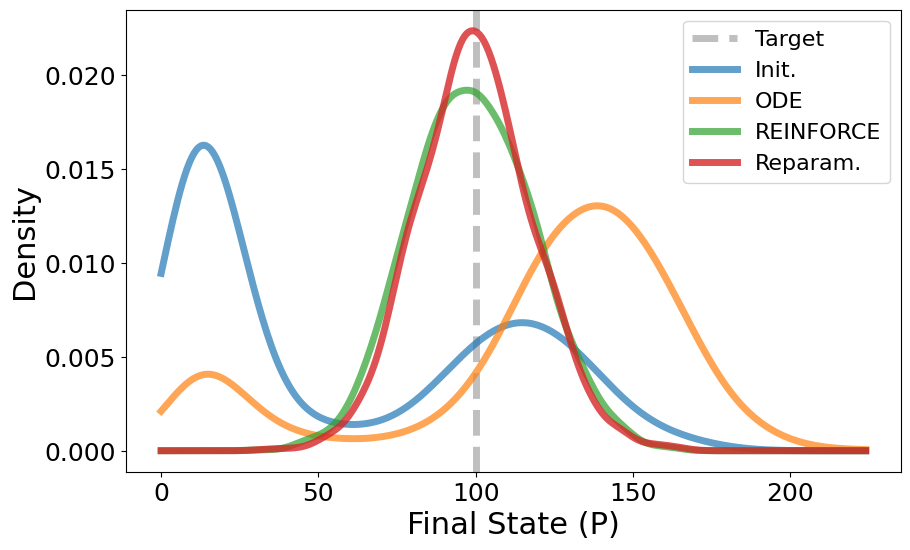
Comparison#
def sim_mf_ensemble_fn(ks, x0):
sol = stx.stochsimsolve(ks, mf_trained_model.network, x0, T=mf_trained_model.T)
return sol
sim_mf_ensemble_fn = eqx.filter_vmap(sim_mf_ensemble_fn, in_axes=(0, None))
# Sample from distributions
n_samples = 2048
key, *subkeys = rng.split(key, n_samples + 1)
subkeys = jnp.array(subkeys)
x0 = jnp.array([0.0, 0.0])
init_distr = sim_init_ensemble_fn(subkeys, x0).x[:, -1, 0]
print('Init. Mean:', init_distr.mean())
print('Init. Std:', init_distr.std())
print()
ode_distr = sim_mf_ensemble_fn(subkeys, x0).x[:, -1, 0]
print('ODE Mean:', ode_distr.mean())
print('ODE Std:', ode_distr.std())
print()
pg_distr = sim_pg_ensemble_fn(subkeys, x0).x[:, -1, 0]
print('PG Mean:', pg_distr.mean())
print('PG Std:', pg_distr.std())
print()
reparam_distr = sim_reparam_ensemble_fn(subkeys, x0).x[:, -1, 0]
print('Repar. Mean:', reparam_distr.mean())
print('Repar. Std:', reparam_distr.std())
print()
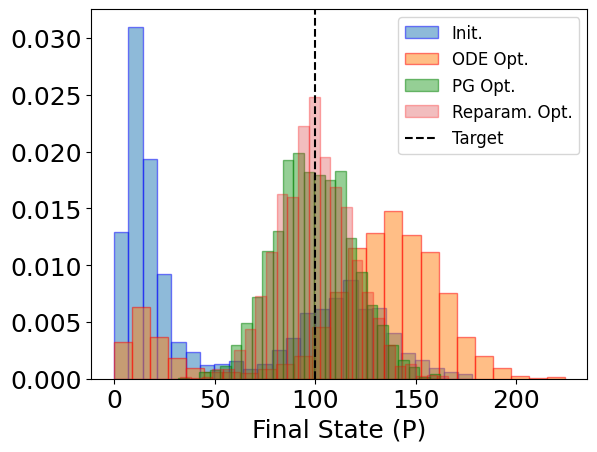
Init. Mean: 57.9267578125
Init. Std: 51.30313087078088
ODE Mean: 119.52392578125
ODE Std: 48.23295940401638
PG Mean: 99.07080078125
PG Std: 19.56478039183227
Repar. Mean: 99.88818359375
Repar. Std: 18.36638023325618
plt.hist(init_distr, bins=25, alpha=0.5, label='Init.', density=True, edgecolor='b')
plt.hist(ode_distr, bins=25, alpha=0.5, label='ODE Opt.', density=True, edgecolor='r')
plt.hist(pg_distr, bins=25, alpha=0.5, label='PG Opt.', density=True, edgecolor='g')
plt.hist(
reparam_distr,
bins=25,
alpha=0.3,
label='Reparam. Opt.',
density=True,
edgecolor='r',
)
plt.axvline(TARGET_PSS, color='k', linestyle='--', label='Target')
plt.xlabel('Final State (P)')
plt.legend(fontsize=12)
plt.show()
import numpy as np
from scipy.stats import gaussian_kde
plt.figure(figsize=(10, 6))
plt.axvline(
TARGET_PSS, color='gray', linestyle='--', linewidth=5, label='Target', alpha=0.5
)
# Create x range for smooth curves
x_min = min(init_distr.min(), ode_distr.min(), pg_distr.min(), reparam_distr.min())
x_max = max(init_distr.max(), ode_distr.max(), pg_distr.max(), reparam_distr.max())
x_range = np.linspace(x_min, x_max, 300)
# Create KDE for each distribution and plot
kde_init = gaussian_kde(init_distr)
plt.plot(x_range, kde_init(x_range), alpha=0.7, label='Init.', linewidth=5)
kde_ode = gaussian_kde(ode_distr)
plt.plot(x_range, kde_ode(x_range), alpha=0.7, label='ODE', linewidth=5)
kde_pg = gaussian_kde(pg_distr)
plt.plot(x_range, kde_pg(x_range), alpha=0.7, label='REINFORCE', linewidth=5)
kde_reparam = gaussian_kde(reparam_distr)
plt.plot(x_range, kde_reparam(x_range), alpha=0.8, label='Reparam.', linewidth=5)
plt.xlabel('Final State (P)', fontsize=22)
plt.ylabel('Density', fontsize=22)
plt.legend(fontsize=16)
plt.show()